Open Dynamics Engine 入門
【5日目】デモ 「こま」
http://www.natural-science.or.jp/article/20110216235836.php
Open Dynamics Engine 入門
【5日目】デモ「こま」
//http://www.natural-science.or.jp/article/20110216235836.php
//Open Dynamics Engine 入門【5日目】デモ「こま」
//上のコードから片方のコマ(コマ1)だけポインタを使わずにコードをかく
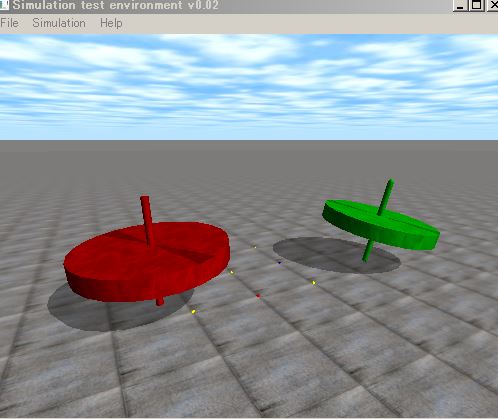
//コマ1 赤色 コマ2 緑
//360行あたりのコードで koma_body2->setGyroscopicMode(false);
//コマ2の姿勢制御モードがオフのなっているので早く倒れる
//
//コマはどんな関数で回るのか? ジョイントがあって回転させる関数はわかるが。
// →
#include
#include
//#include "texturepath.h"
#ifdef _MSC_VER
#pragma warning(disable:4244 4305) // for VC++, no precision loss complaints
#endif
#ifndef DRAWSTUFF_TEXTURE_PATH
#define DRAWSTUFF_TEXTURE_PATH "C:/ode-0.11.1/drawstuff/textures"
#endif
// select correct drawing functions
#ifdef dDOUBLE
#define dsDrawBox dsDrawBoxD
#define dsDrawSphere dsDrawSphereD
#define dsDrawCylinder dsDrawCylinderD
#define dsDrawCapsule dsDrawCapsuleD
#define dsDrawConvex dsDrawConvexD
#endif
bool write_world = false; //このodeシュミレーションをファイルに出力するフラッグ
bool show_contacts = false; //地面と接触している点を表示。わかりにくいので元コードより大きくした
dWorld * world;
dBody *koma_body2;
dBodyID koma_body1; //koma_body1をポインタ表現しない
dSpace *space;
dJointGroup contactgroup;
const dReal zikuradius = 0.05f; //pinradiusを zikuradiusに変更、以下同様
const dReal zikulength = 1.5f;
const dReal koma_bodyradius = 1.0f; //topradiusを koma_bodyradiusに変更、以下同様
const dReal koma_bodylength = 0.25f;
const dReal koma_bodymass = 1.0f;
#define MAX_CONTACTS 4
static void nearCallback (void *data, dGeomID o1, dGeomID o2)
{
// for drawing the contact points
dMatrix3 RI;
dRSetIdentity (RI); //行列RIを単位行列にセットする。回転していない状態に
//する
//const dReal ss[3] = {0.02,0.02,0.02};
const dReal ss[3] = {0.2,0.2,0.2};
// 94行あたりで if (show_contacts) 床とコマの接触面を表示するdsDrawBoxdの大
// きさ
//サイズが小さくてわからないので、元コードより大きくした。
int i;
dBodyID b1 = dGeomGetBody(o1);
dBodyID b2 = dGeomGetBody(o2);
dContact contact[MAX_CONTACTS];
//以下接触点の数をnumcで得ている。定番のコード
int numc = dCollide (o1,o2,MAX_CONTACTS,&contact[0].geom,
sizeof(dContact));
// dContact contact[MAX_CONTACTS];
// //接触情報を格納する配列
// int numc = dCollide(
// o1,
// o2,
// MAX_CONTACTS, //接触点の最大数
// &contact[0].geom, //接触情報を格納するdContactGeom構造体
// sizeof(dContact) //引数はここはdContactかdContactGeomでいいみたい
// );
// //dCollide: 接触情報を作成する 戻り値は接触点の数 衝突しない場合は0
//接触していたら
for (i=0; i contact[i].surface.mode = dContactApprox1;
//接触面の性質を設定する
// http://www.koj-m.sakura.ne.jp/ode/index.php?%CB%E0%BB%A4%A1%F5%C0%DC%BF%A8%CA%D4
//『dContactApprox1』のフラグを追加する.その 場合,『surface.mu=1』に対応
//する力まで物体は滑らない.それに対し『dContactApprox1』のフラグを立てな
//い場合は,静摩擦は 無く,『surface.mu=1』に対応する動摩擦力のみ適用され
//る.
// http://hhhappyyyymoto.blogspot.jp/2015/10/so-zou.html?zx=fd636d6421be3cef
//ode 摩擦 dContactApprox1 Blogger
//要するに 摩擦が大事なプログラムでは dContactApprox1にしたらいい?
contact[i].surface.mu = 2;
//摩擦係数(摩擦方向1)
//最大値は1ではないか?
dJointID c = dJointCreateContact (*world,contactgroup,contact+i);
//contact+iは&contact[i]と同じか?
dJointAttach (c,b1,b2);
//接触ジョイントの作成
if (show_contacts)
dsDrawBox (contact[i].geom.pos, RI, ss);
//dsDrawBox( dBodyGetPosition( box ), dBodyGetRotation( box ),
//box_sizes );
}
}
// start simulation - set viewpoint
static void start()
{
static float xyz[3] = {4.777f, -2.084f, 2.18f};
static float hpr[3] = {153.0f, -14.5f, 0.0f};
dsSetViewpoint (xyz,hpr);
printf ("SPACE to reset\n"); //リセット
printf ("A to tilt the koma_bodys. katamuku\n"); //こまを傾ける
printf ("T to toggle showing the contact points. sessyoku_tenn_hyouzi\n");//床とコマの接触点を表示
printf ("1 to save the current state to 'state.dif'.\n"); //ファイルに保存
}
char locase (char c) //大文字を小文字に変換
{
if (c >= 'A' && c <= 'Z') return c - ('a'-'A');
else return c;
}
// called when a key pressed
static void reset();
static void tilt(); //tilt 意味は傾斜 傾ける など
static void command (int cmd)
{
cmd = locase (cmd);
if (cmd == ' ')
{
reset();
}
else if (cmd == 'a') {
tilt();
}
else if (cmd == 't') {
show_contacts = !show_contacts;
}
else if (cmd == '1') {
write_world = true;
}
}
// simulation loop
static void simLoop (int pause)
{
dsSetColor (0,0,2);
space->collide(0,&nearCallback);
//●dSpaceCollide(space,0,&nearCallback);
if (!pause)
//world->quickStep(0.02);
world->step(0.02);
//●dWorldStep(world,0.02);
if (write_world) {
FILE *f = fopen ("state.dif","wt");
if (f) {
dWorldExportDIF (*world,f,"X");
//ワールドの状態を出力します。出力先は、引数のfileで指定します。
//void dWorldExportDIF(dWorldID w, FILE *file, const char *world_name);
//"X"とはどこから、持ってきた?
fclose (f);
}
write_world = false;
}
// remove all contact joints
dJointGroupEmpty (contactgroup);
//テクスチャを変えている。難しいことはわからない。
dsSetTexture (DS_WOOD);
//以下コマ1の本体 軸 を描画
dsSetColor (1.0, 0.0, 0.0); //赤
dsDrawCylinder( dBodyGetPosition(koma_body1),
dBodyGetRotation(koma_body1),
koma_bodylength, koma_bodyradius );
dsDrawCylinder( dBodyGetPosition(koma_body1),
dBodyGetRotation(koma_body1),
zikulength, zikuradius );
//以下コマ2の本体 軸 を描画
dsSetColor (0.0, 1.0, 0.0); //緑
dsDrawCylinder(koma_body2->getPosition(),
koma_body2->getRotation(),
koma_bodylength, koma_bodyradius);
dsDrawCapsule(koma_body2->getPosition(),
koma_body2->getRotation(),
zikulength, zikuradius);
}
static void reset()
{
dMatrix3 R; //dMatrix3[ 4 * 3 ]
dRSetIdentity(R); //Rを単位行列 にする
// 剛体dBodyIDの姿勢を回転行列Rに設定する。
dBodySetRotation(koma_body1, R);
koma_body2->setRotation(R);
dBodySetPosition(koma_body1,0.8f, -2, 2);
koma_body2->setPosition(0.8f, 2, 2);
//bodyの角速度を絶対座標系の各軸周りに(x, y, z) [rad/s]と設定します
// 上がコマが回る源の関数だろう
dBodySetAngularVel( koma_body1, 0,0,5);
koma_body2->setAngularVel(0,0,5);
dBodySetLinearVel(koma_body1, 0,0.2f,0);
koma_body2->setLinearVel(0,0.2f,0);
//bodyの速度を絶対座標系で(x, y, z) [m/s]に設定します
//剛体の速度の設定はdBodySetLinearVel()、角速度の設定は
//dBodySetAngularVel()、を使います。ただし、この速度は重心の速度、角速度は重
//心周りの角速度です。また、ボディの速度を設定することは初期状態だけにし、時
//間ステップ毎に強制的にある速度を設定することは、実際の物理現象とは異なった
//挙動を生み出してしまいますので避けてください。
//もし、物体の速度をコントロールした場合は、関節に付属しているモータを使って
//ください http://demura.net/9ode/481.html
// 上からの意味だと初期にy軸方向に少しふらつかせている。
// なんでかな?
}
static void tilt()
{
dBodyAddTorque(koma_body1, 0, 10, 0);
koma_body2->addTorque(0, 10, 0);
//原点から手前方向にx 右にy //上にz
//ボディの重心を作用点にして絶対座標(0, 10, 0)のベクトルのトルクを加える。
//ということは、手前方向に倒れるトルクが働く
//以下トルクの定義
//http://www.washimo-web.jp/Technology/Statics/No06/Statics06.htm
//何の意味が?
//上はaキーで実行されるが、やってもただ単にコマをふらつかせて遊んでいるだけ
}
int main (int argc, char **argv)
{
// setup pointers to drawstuff callback functions
dsFunctions fn;
fn.version = DS_VERSION;
fn.start = &start;
fn.step = &simLoop;
fn.command = &command;
fn.stop = 0;
fn.path_to_textures = DRAWSTUFF_TEXTURE_PATH;
// create world
// ポインタを使わないmainのほうが簡単と思うが
// ① 以下であるならば
// static dWorldID world;
// static dSpaceID space;
// static dGeomID ground;
// static dJointID fixed;
// static dJointID joint_ball; //ボールジョイント
// static dJointGroupID contactgroup;
dInitODE();
// ② ワールド作成
// world = dWorldCreate();
world = new dWorld();
// ③重力の設定
world->setGravity(0,0,-0.5f);
// dWorldSetGravity(world,0,0,-0.5f);
// ④ 拘束
world->setCFM(1e-5f); //@eCFMを設定 弱い拘束にしているのか?
// dWorldSetCFM (world, 1e-5f);
// 小さな値では強い (hard) 拘束となり、大きな値では弱い (soft) 拘束となりま
// 既定値 10^-10 (単精度では10^-5) 範囲 10^-9 ~ 1
// http://demura.net/9ode/351.html 拘束について
// ⑤速度減衰率を設定0~1の間 デフォルトは0 つまり減衰しない?
world->setLinearDamping(0.00001f);
//角速度減衰率を設定
// dWorldSetLinearDamping(world, 0.00001f)
world->setAngularDamping(0.0001f);
//上の2つの設定、限りなく0に近いので設定しなくてもいいのでは?
// ⑥dSpace型のオブジェクトを生成(衝突空間の生成)
space = new dSimpleSpace(0);
// space = dSimpleSpaceCreate (0);
// ⑦
dPlane *floor = new dPlane(*space, 0,0,1,0);
// ground = dCreatePlane(space,0,0,1,0);
// ⑧
// 以下のようにかけるかも
// typedef struct {
// dBodyID body;
// dGeomID geom;
// dReal radius,length,width,height,mass;
// } myLink;
// myLink koma_body1,koma_body2;
//ボディの生成
koma_body1 = dBodyCreate(*world);
koma_body2 = new dBody(*world);
// ⑩
dMass m;
// 元コードにはdMassSetZero(&m);のような初期化のコードがはいっていないが?
dMassSetZero(&m);
// ⑪シリンダー型の質量をセット
//m.setCylinderTotal(1, 3, koma_bodyradius, koma_bodylength);
dMassSetCylinderTotal(&m, 1, 3, koma_bodyradius, koma_bodylength);
// OdeMass::set_cylinder_total(float total_mass, int direction, float radius, float length);
// direction:方向
// @@dMassSetCylinderTotal(this,total,direction,radius,length) と同じ?
// google で検索してもヒットしない。
// void dMassSetCapsuleTotal (
// dMass *mass,
// dReal total_mass, // 質量
// int direction, // 長軸方向(1=x軸 2=y軸 3=z軸)
// dReal radius, // 半径
// dReal length // 長さ
// );
//⑫ボディに質量をセット
dBodySetMass(koma_body1, &m);
koma_body2->setMass(m);
// ⑬
static dGeomID koma_geom1;
dGeom *g2, *ziku1, *ziku2;
//dGeom *g1, *g2, *ziku1, *ziku2;
// ⑭ジオメトリ作成
koma_geom1 = dCreateCylinder(*space, koma_bodyradius, koma_bodylength);
g2 = new dCylinder(*space, koma_bodyradius, koma_bodylength);
// ⑮ジオメトリgeomをボディbodyに関連付けます.
dGeomSetBody(koma_geom1, koma_body1);
g2->setBody(*koma_body2);
// ⑯軸のジオメトリ作成
ziku1 = new dCapsule(*space, zikuradius, zikulength);
ziku2 = new dCapsule(*space, zikuradius, zikulength);
// なんでkoma_body1にg1とziku1のgeomを同時にセットするのか。
// そんな事が可能なのか?
// 円柱状のgeomの上下に少しだけ細いカプセル状のgeomが突き出ている事になる
// ⑰軸のボディを作成せずにコマ本体にジオメトリを関連付ける
dGeomSetBody(*ziku1, koma_body1);
ziku2->setBody(*koma_body2);
// コマ2だけ姿勢制御モード(緑色のこま)をはずしているみたい
koma_body2->setGyroscopicMode(false);
//上をコメントアウトすると緑色のこまが先に倒れる
//dBodySetGyroscopicMode(0) と同じだと思う
reset();
// run simulation
dsSimulationLoop (argc,argv,512,384,&fn);
//delete g1;
delete g2;
delete ziku1;
delete ziku2;
delete floor;
contactgroup.empty();
//koma_body1はnewしていないので、deleteはいらないのか
//でも、koma_body1だけ動的確保がされていないのか?
delete &koma_body1;
delete koma_body2;
delete space;
delete world;
//なんで手動でdeleteするのか?以下ではだめか?
//スペースのクリーンナップモードを有効にすることで、スペースを破棄したときに
//そこに含まれるジオメトリも自動的に破棄されるようになります。これは既定で有
//効となっています。
//dGeomDestroy ( dGeomID geom )k //ジオメトリの破棄
//dJointGroupDestroy( contactgroup ); // ジョイントグループの破棄
//dSpaceDestroy( space ); // スペースの破棄
//dWorldDestroy( world ); // 世界の破壊
//
// 私ばかよねー オバカさんよねー
//http://www.flow.cs.is.nagoya-u.ac.jp/hamada/programming/cpp5.html
//配列の動的確保
// new をしたら deleteをしないとだめ
dCloseODE();
}
//接触面の性質を設定する
// http://www.koj-m.sakura.ne.jp/ode/index.php?%CB%E0%BB%A4%A1%F5%C0%DC%BF%A8%CA%D4
//『dContactApprox1』のフラグを追加する.その 場合,『surface.mu=1』に対応
//する力まで物体は滑らない.それに対し『dContactApprox1』のフラグを立てな
//い場合は,静摩擦は 無く,『surface.mu=1』に対応する動摩擦力のみ適用され
//る.
// http://hhhappyyyymoto.blogspot.jp/2015/10/so-zou.html?zx=fd636d6421be3cef
//ode 摩擦 dContactApprox1 Blogger
//要するに 摩擦が大事なプログラムでは dContactApprox1にしたらいい?
contact[i].surface.mu = 2;
//摩擦係数(摩擦方向1)
//最大値は1ではないか?
dJointID c = dJointCreateContact (*world,contactgroup,contact+i);
//contact+iは&contact[i]と同じか?
dJointAttach (c,b1,b2);
//接触ジョイントの作成
if (show_contacts)
dsDrawBox (contact[i].geom.pos, RI, ss);
//dsDrawBox( dBodyGetPosition( box ), dBodyGetRotation( box ),
//box_sizes );
}
}
// start simulation - set viewpoint
static void start()
{
static float xyz[3] = {4.777f, -2.084f, 2.18f};
static float hpr[3] = {153.0f, -14.5f, 0.0f};
dsSetViewpoint (xyz,hpr);
printf ("SPACE to reset\n"); //リセット
printf ("A to tilt the koma_bodys. katamuku\n"); //こまを傾ける
printf ("T to toggle showing the contact points. sessyoku_tenn_hyouzi\n");//床とコマの接触点を表示
printf ("1 to save the current state to 'state.dif'.\n"); //ファイルに保存
}
char locase (char c) //大文字を小文字に変換
{
if (c >= 'A' && c <= 'Z') return c - ('a'-'A');
else return c;
}
// called when a key pressed
static void reset();
static void tilt(); //tilt 意味は傾斜 傾ける など
static void command (int cmd)
{
cmd = locase (cmd);
if (cmd == ' ')
{
reset();
}
else if (cmd == 'a') {
tilt();
}
else if (cmd == 't') {
show_contacts = !show_contacts;
}
else if (cmd == '1') {
write_world = true;
}
}
// simulation loop
static void simLoop (int pause)
{
dsSetColor (0,0,2);
space->collide(0,&nearCallback);
//●dSpaceCollide(space,0,&nearCallback);
if (!pause)
//world->quickStep(0.02);
world->step(0.02);
//●dWorldStep(world,0.02);
if (write_world) {
FILE *f = fopen ("state.dif","wt");
if (f) {
dWorldExportDIF (*world,f,"X");
//ワールドの状態を出力します。出力先は、引数のfileで指定します。
//void dWorldExportDIF(dWorldID w, FILE *file, const char *world_name);
//"X"とはどこから、持ってきた?
fclose (f);
}
write_world = false;
}
// remove all contact joints
dJointGroupEmpty (contactgroup);
//テクスチャを変えている。難しいことはわからない。
dsSetTexture (DS_WOOD);
//以下コマ1の本体 軸 を描画
dsSetColor (1.0, 0.0, 0.0); //赤
dsDrawCylinder( dBodyGetPosition(koma_body1),
dBodyGetRotation(koma_body1),
koma_bodylength, koma_bodyradius );
dsDrawCylinder( dBodyGetPosition(koma_body1),
dBodyGetRotation(koma_body1),
zikulength, zikuradius );
//以下コマ2の本体 軸 を描画
dsSetColor (0.0, 1.0, 0.0); //緑
dsDrawCylinder(koma_body2->getPosition(),
koma_body2->getRotation(),
koma_bodylength, koma_bodyradius);
dsDrawCapsule(koma_body2->getPosition(),
koma_body2->getRotation(),
zikulength, zikuradius);
}
static void reset()
{
dMatrix3 R; //dMatrix3[ 4 * 3 ]
dRSetIdentity(R); //Rを単位行列 にする
// 剛体dBodyIDの姿勢を回転行列Rに設定する。
dBodySetRotation(koma_body1, R);
koma_body2->setRotation(R);
dBodySetPosition(koma_body1,0.8f, -2, 2);
koma_body2->setPosition(0.8f, 2, 2);
//bodyの角速度を絶対座標系の各軸周りに(x, y, z) [rad/s]と設定します
// 上がコマが回る源の関数だろう
dBodySetAngularVel( koma_body1, 0,0,5);
koma_body2->setAngularVel(0,0,5);
dBodySetLinearVel(koma_body1, 0,0.2f,0);
koma_body2->setLinearVel(0,0.2f,0);
//bodyの速度を絶対座標系で(x, y, z) [m/s]に設定します
//剛体の速度の設定はdBodySetLinearVel()、角速度の設定は
//dBodySetAngularVel()、を使います。ただし、この速度は重心の速度、角速度は重
//心周りの角速度です。また、ボディの速度を設定することは初期状態だけにし、時
//間ステップ毎に強制的にある速度を設定することは、実際の物理現象とは異なった
//挙動を生み出してしまいますので避けてください。
//もし、物体の速度をコントロールした場合は、関節に付属しているモータを使って
//ください http://demura.net/9ode/481.html
// 上からの意味だと初期にy軸方向に少しふらつかせている。
// なんでかな?
}
static void tilt()
{
dBodyAddTorque(koma_body1, 0, 10, 0);
koma_body2->addTorque(0, 10, 0);
//原点から手前方向にx 右にy //上にz
//ボディの重心を作用点にして絶対座標(0, 10, 0)のベクトルのトルクを加える。
//ということは、手前方向に倒れるトルクが働く
//以下トルクの定義
//http://www.washimo-web.jp/Technology/Statics/No06/Statics06.htm
//何の意味が?
//上はaキーで実行されるが、やってもただ単にコマをふらつかせて遊んでいるだけ
}
int main (int argc, char **argv)
{
// setup pointers to drawstuff callback functions
dsFunctions fn;
fn.version = DS_VERSION;
fn.start = &start;
fn.step = &simLoop;
fn.command = &command;
fn.stop = 0;
fn.path_to_textures = DRAWSTUFF_TEXTURE_PATH;
// create world
// ポインタを使わないmainのほうが簡単と思うが
// ① 以下であるならば
// static dWorldID world;
// static dSpaceID space;
// static dGeomID ground;
// static dJointID fixed;
// static dJointID joint_ball; //ボールジョイント
// static dJointGroupID contactgroup;
dInitODE();
// ② ワールド作成
// world = dWorldCreate();
world = new dWorld();
// ③重力の設定
world->setGravity(0,0,-0.5f);
// dWorldSetGravity(world,0,0,-0.5f);
// ④ 拘束
world->setCFM(1e-5f); //@eCFMを設定 弱い拘束にしているのか?
// dWorldSetCFM (world, 1e-5f);
// 小さな値では強い (hard) 拘束となり、大きな値では弱い (soft) 拘束となりま
// 既定値 10^-10 (単精度では10^-5) 範囲 10^-9 ~ 1
// http://demura.net/9ode/351.html 拘束について
// ⑤速度減衰率を設定0~1の間 デフォルトは0 つまり減衰しない?
world->setLinearDamping(0.00001f);
//角速度減衰率を設定
// dWorldSetLinearDamping(world, 0.00001f)
world->setAngularDamping(0.0001f);
//上の2つの設定、限りなく0に近いので設定しなくてもいいのでは?
// ⑥dSpace型のオブジェクトを生成(衝突空間の生成)
space = new dSimpleSpace(0);
// space = dSimpleSpaceCreate (0);
// ⑦
dPlane *floor = new dPlane(*space, 0,0,1,0);
// ground = dCreatePlane(space,0,0,1,0);
// ⑧
// 以下のようにかけるかも
// typedef struct {
// dBodyID body;
// dGeomID geom;
// dReal radius,length,width,height,mass;
// } myLink;
// myLink koma_body1,koma_body2;
//ボディの生成
koma_body1 = dBodyCreate(*world);
koma_body2 = new dBody(*world);
// ⑩
dMass m;
// 元コードにはdMassSetZero(&m);のような初期化のコードがはいっていないが?
dMassSetZero(&m);
// ⑪シリンダー型の質量をセット
//m.setCylinderTotal(1, 3, koma_bodyradius, koma_bodylength);
dMassSetCylinderTotal(&m, 1, 3, koma_bodyradius, koma_bodylength);
// OdeMass::set_cylinder_total(float total_mass, int direction, float radius, float length);
// direction:方向
// @@dMassSetCylinderTotal(this,total,direction,radius,length) と同じ?
// google で検索してもヒットしない。
// void dMassSetCapsuleTotal (
// dMass *mass,
// dReal total_mass, // 質量
// int direction, // 長軸方向(1=x軸 2=y軸 3=z軸)
// dReal radius, // 半径
// dReal length // 長さ
// );
//⑫ボディに質量をセット
dBodySetMass(koma_body1, &m);
koma_body2->setMass(m);
// ⑬
static dGeomID koma_geom1;
dGeom *g2, *ziku1, *ziku2;
//dGeom *g1, *g2, *ziku1, *ziku2;
// ⑭ジオメトリ作成
koma_geom1 = dCreateCylinder(*space, koma_bodyradius, koma_bodylength);
g2 = new dCylinder(*space, koma_bodyradius, koma_bodylength);
// ⑮ジオメトリgeomをボディbodyに関連付けます.
dGeomSetBody(koma_geom1, koma_body1);
g2->setBody(*koma_body2);
// ⑯軸のジオメトリ作成
ziku1 = new dCapsule(*space, zikuradius, zikulength);
ziku2 = new dCapsule(*space, zikuradius, zikulength);
// なんでkoma_body1にg1とziku1のgeomを同時にセットするのか。
// そんな事が可能なのか?
// 円柱状のgeomの上下に少しだけ細いカプセル状のgeomが突き出ている事になる
// ⑰軸のボディを作成せずにコマ本体にジオメトリを関連付ける
dGeomSetBody(*ziku1, koma_body1);
ziku2->setBody(*koma_body2);
// コマ2だけ姿勢制御モード(緑色のこま)をはずしているみたい
koma_body2->setGyroscopicMode(false);
//上をコメントアウトすると緑色のこまが先に倒れる
//dBodySetGyroscopicMode(0) と同じだと思う
reset();
// run simulation
dsSimulationLoop (argc,argv,512,384,&fn);
//delete g1;
delete g2;
delete ziku1;
delete ziku2;
delete floor;
contactgroup.empty();
//koma_body1はnewしていないので、deleteはいらないのか
//でも、koma_body1だけ動的確保がされていないのか?
delete &koma_body1;
delete koma_body2;
delete space;
delete world;
//なんで手動でdeleteするのか?以下ではだめか?
//スペースのクリーンナップモードを有効にすることで、スペースを破棄したときに
//そこに含まれるジオメトリも自動的に破棄されるようになります。これは既定で有
//効となっています。
//dGeomDestroy ( dGeomID geom )k //ジオメトリの破棄
//dJointGroupDestroy( contactgroup ); // ジョイントグループの破棄
//dSpaceDestroy( space ); // スペースの破棄
//dWorldDestroy( world ); // 世界の破壊
//
// 私ばかよねー オバカさんよねー
//http://www.flow.cs.is.nagoya-u.ac.jp/hamada/programming/cpp5.html
//配列の動的確保
// new をしたら deleteをしないとだめ
dCloseODE();
}
0 件のコメント:
コメントを投稿